CalTrout News

 By Sandra Jacobson, Ph.D., CalTrout's South Coast Regional Director
By Sandra Jacobson, Ph.D., CalTrout's South Coast Regional Director
Lagoons and estuaries, where freshwater meets the ocean along California's coast, are among the state's most ecologically rich—and most threatened—habitats. For endangered Southern California steelhead, these dynamic ecosystems can mean the difference between survival and decline, providing critical rearing habitat and transition zones as young fish prepare for life in the ocean. Understanding how lagoons function, and how they respond to restoration efforts, is essential to recovering steelhead and the countless other species that depend on them.
Yet monitoring these environments has long been costly, labor-intensive, and limited in scope. Reliable data is the foundation of effective restoration; without it, practitioners are left guessing whether habitat conditions, fish populations, or ecosystem health are actually improving. To address this challenge, CalTrout's South Coast team, alongfside engineers, coders, and scientists in San Diego, has spent the last year developing an innovative robotic unmanned surface vehicle that autonomously collects real-time water chemistry data and underwater video. The result is a powerful new tool that provides restoration practitioners with the precise, site-specific insights needed to make smarter decisions and measure success. Join us behind the scenes as we explore how the vessel was built—and the team and technology making it possible.
Meet the BlueBoat: An Unmanned Surface Vehicle (USV) Unlocking New Insights Beneath the Water Surface
CalTrout and partners in San Diego are developing new technology to monitor large bodies of water, like lagoons and estuaries, for water quality and aquatic species using a small Unmanned Surface Vehicle (USV). While aquatic robotics have been deployed deep in oceans, this is a high-tech, cost-effective USV that collects real-time data in bodies of water on a pre-programmed mission. Outfitted with water chemistry probes and an underwater video camera, the data feed allows scientists to correlate local water chemistry with aquatic species presence.
Lagoons have different micro-environments which contribute to their importance as biodiversity hot-spots at the land-ocean interface. This correlation is a powerful tool at its core, and the USV can be further customized with other tech capabilities such as water collection for environmental DNA analysis (to detect non-visible organisms by molecular fingerprinting) and a sonar unit for bathymetry (to visualize the sub-surface contours and make inferences around what life might be present through this alternative method). The combination of these capabilities makes comprehensive data collection and ecological interpretation possible and scalable and unlocks a powerful tool for conservation.
Overcoming the Limits of Traditional Monitoring
Traditional monitoring methods such as seining, snorkeling, and electrofishing are labor intensive and expensive, and may require costly post-sampling lab analysis. These methods also have limitations of site accessibility, monitoring frequency, and cost-effectiveness. As such, we were tasked with the challenge of identifying and creating a platform that could enhance ecological monitoring, reduce labor costs, and inform restoration assessment and decision-making. The process involved researching commercially available USVs and consulting with marine robotics companies to configure a platform for our team to transform into an operational unit. The device we ultimately ended up producing can capture underwater videography to correlate aquatic species’ presence/distribution with local microchemistry environment in water bodies across California, overcoming many limitations of traditional methods.
Building the Robot: Step One – Robotics Configuration
The first step in developing the USV robotics unit was to determine the best configuration. We were fortunate to have UC San Diego Scripps Institution of Oceanography Master’s student Kamryn McLeran partner with CalTrout on her Capstone Project in 2025. As a part of her project, she successfully devised and tested a configuration that would meet our criteria for a mobile, inexpensive deployable device that would transform our data collection abilities in lagoons (closed or intermittently closed coastal habitats) and estuaries (tidally connected habitats where freshwater and seawater mix).
Kamryn down-selected options to arrive at a solution that integrated a BlueRobotics small USV with a FieldKit water chemistry sensor kit to monitor water chemistry. This small USV configuration is portable and can be programmed for transects, a fixed path used in scientific surveys to study the distribution and abundance of organisms, yet large enough to carry payload across a lagoon. Blue Robotics is a Southern California company at the forefront of this open-source technology – and following technical discussions with the engineering team – the BlueBoat USV was chosen as the primary platform due to its modular, customizable design and affordability. The BlueBoat package includes all necessary parts to allow for full construction including the hardware and onboard computers. The double hull design allows for the boat to be folded to a smaller size for easy transport. To meet the project’s monitoring goals, the BlueBoat USV was outfitted with a water quality sensor kit from FieldKit, allowing for the collection of key parameters such as temperature, pH, dissolved oxygen, and conductivity.

With funding from the Dorrance Foundation and guidance from the Scripps team, CalTrout purchased, assembled, and site tested the equipment. Pilot runs at Buena Vista Lagoon in northern San Diego County proved the effectiveness of the configuration. These runs pointed to the possibility of incorporating coding and wiring improvements for integrated data collection/display and long-distance signal transmission.


Step Two: Electronic and Coding Configuration
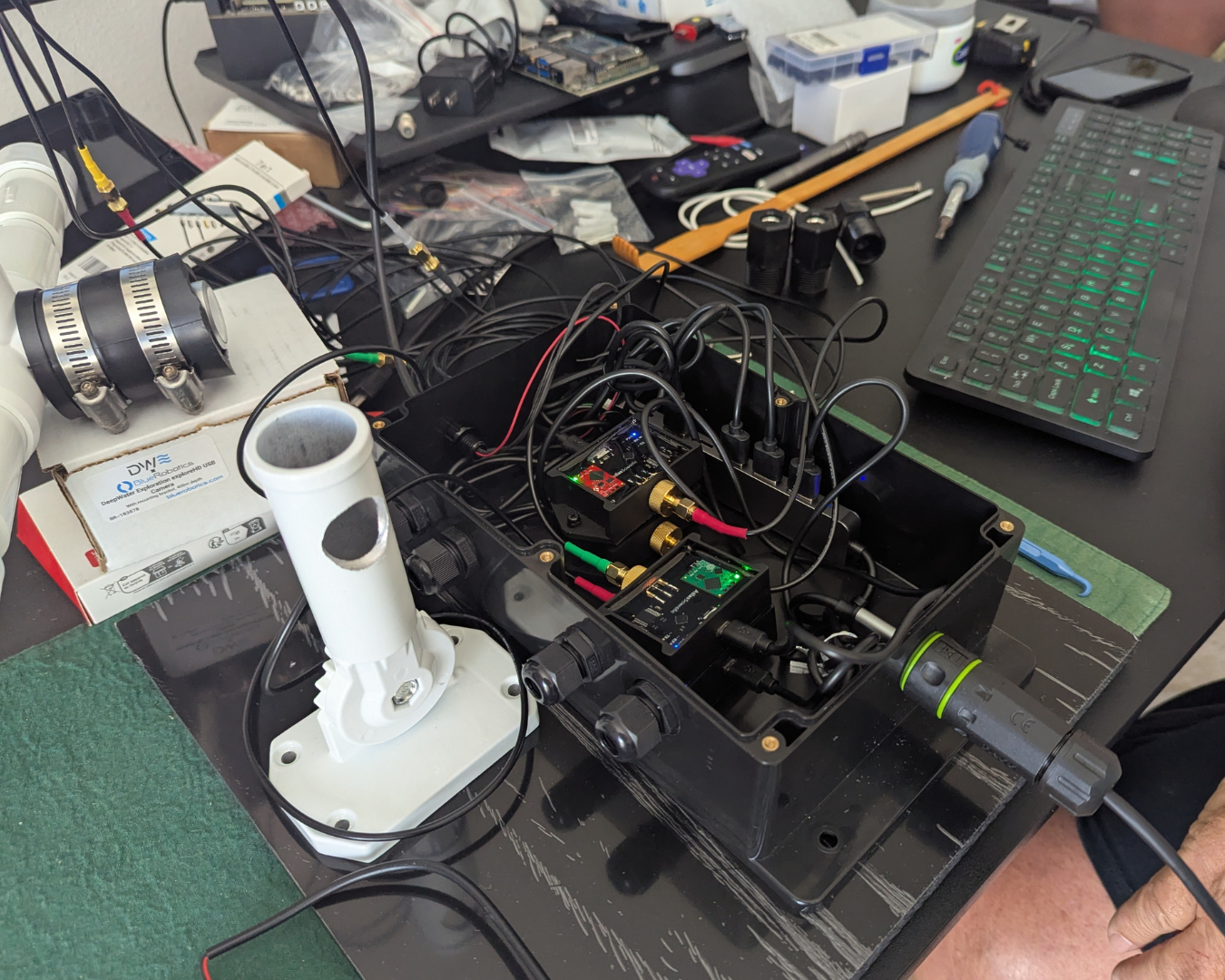
The next step was to re-wire the operating system and link water chemistry sensors from Atlas Scientific into the BlueBoat’s onboard Raspberry Pi4 computer which is programmed to manage multiple system functionalities and integrate with external data collection devices.
The Team
Our Robotics Development Team brought together an eclectic and productive mix of people with scientific backgrounds and eyes for ingenuity. Rod Sheffield (ZygoDigital) is an entrepreneur with years of leading-edge coding and data integration experience that led to AI-based computing power, and Howard Pippen (retired SAIC) is a retired engineer who has worked on sophisticated computer simulation models for airborne particles. Howard collaborated with Sandi eight years ago on CalTrout’s first foray into the robotics world by building and running an early progenitor remotely operated vehicle (ROV) small device for deployment in San Diego streams. The team also includes Paige DeCino, who has led water quality monitoring in northern San Diego, taught students about the environment, and led the UCSD iNaturalist program for years. Sandi Jacobson (CalTrout) continues to guide tech team activities and implement environmental projects through the region. Kamryn McLeran, a crucial initial member of the team, has moved into an oyster-based water remediation start-up following her graduation from Scripps but remains part of the Team.

The Approach
The Team has met consistently over the last year to evolve the BlueBoat unit. The BlueBoat was originally operated via QGroundControl (QGC) software, which allows users to plan missions, control the vessel, and visualize data in real-time. This was changed to Cockpit software to allow a more effective interface with data collection devices. A laptop is connected directly to the BaseStation via USB-C or WiFi. The BaseStation acts as a WiFi access point for the BlueBoat and allows the user to maintain communication with the boat. A cellular connection for the BaseStation has been incorporated to increase the connectivity distance on mission. With an antenna connection, the BaseStation can maintain a connection between the laptop and the boat while the boat is deployed.
The Details
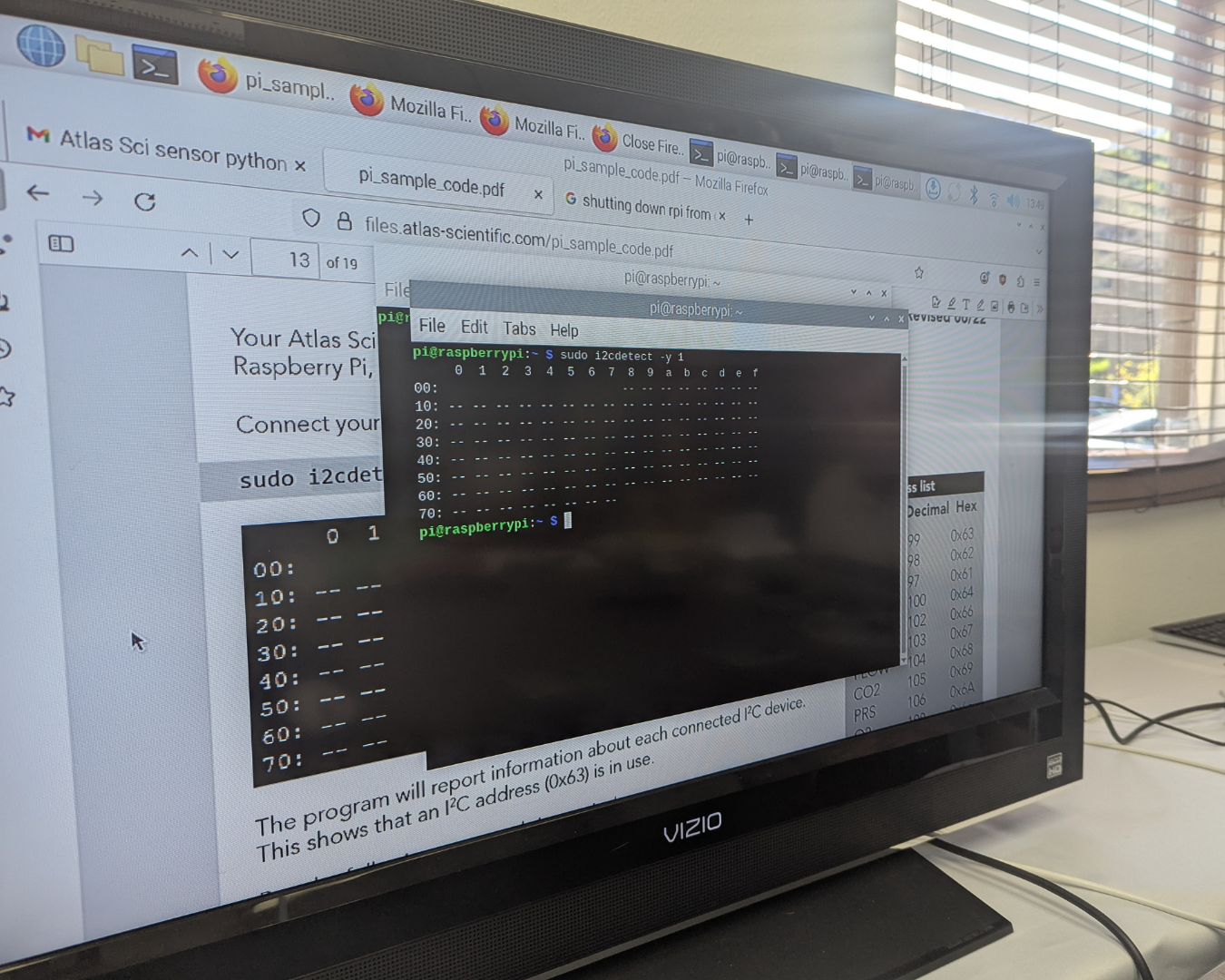
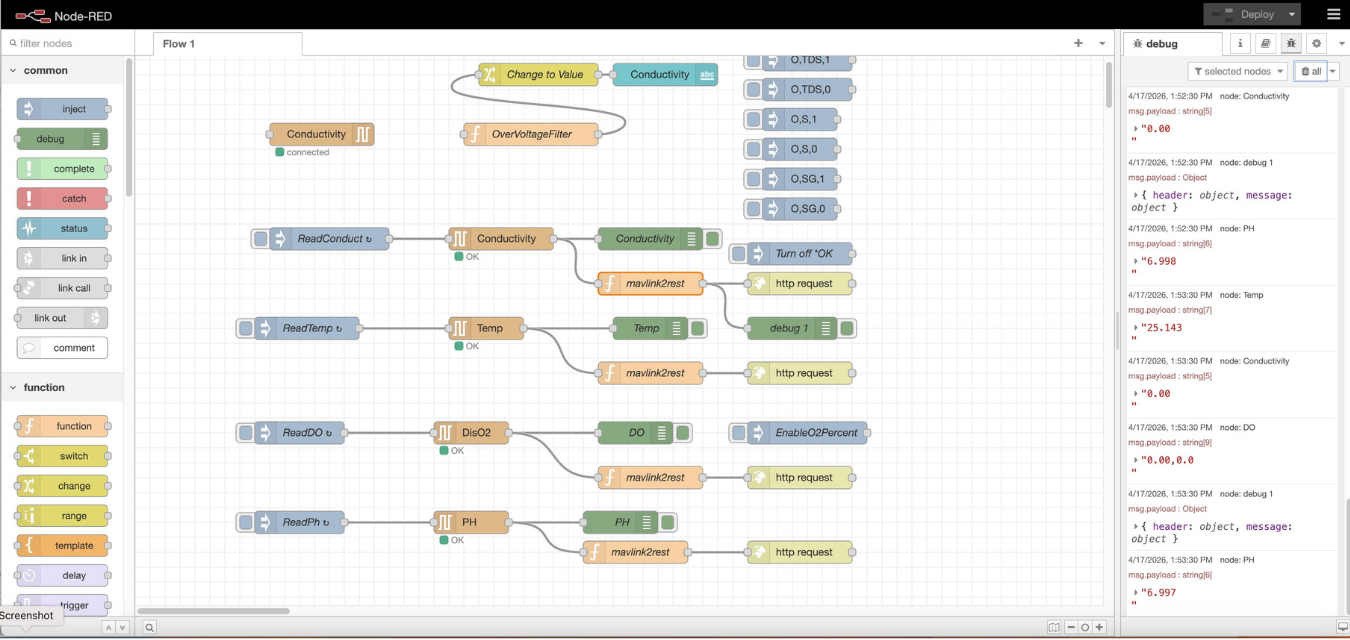
The Blue Boat runs the Blue OS operating system on the RPi in the boat rather than the normal operating system. Blue OS Docker Container has a variety of Extensions, which are Docker Images that run within Blue OS. Blue OS has an Extension for the DWE underwater camera. That camera provides h.264 compressed video from a 1080p digital camera. Blue OS has an extension for Node Red graphical programming. Node Red contains graph nodes for serial input, which works with the Atlas Scientific probes selected for conductivity, temperature, PH, and Dissolved Oxygen. When the sensors are hooked up to the computer and the interface is active, the screen looks like the image at the right.

Team member Rod Sheffield devised an ingenious system for the BlueBoat. A single USB hub with nine ports was selected to consolidate all the sensor probe inputs with the camera input. That was all placed inside a waterproof enclosure with a single USB output. That USB output line is then routed through the Blue Boat’s Starboard side which also contains the cellular modem for extended range, which supports remote viewing. The probes and camera are mounted on a swiveling mount to allow for easy transport. Wires are run through the mounting pole up to the waterproof enclosure near the midsection of the boat to allow for minimum interference with the probes and propulsion of the boat.
Both QGC and Cockpit can be used to create mission paths for doing surveys. Cockpit has the additional capability to show water sensor data as mini widgets on the bottom of the display.
Step Three: Demo Runs & Preparing the Vessel for Lagoon Operations
Taking the unit into the water is easy – just fold it, load it, and go. Setting up the Cockpit and connecting to the probes and camera takes a bit of time.
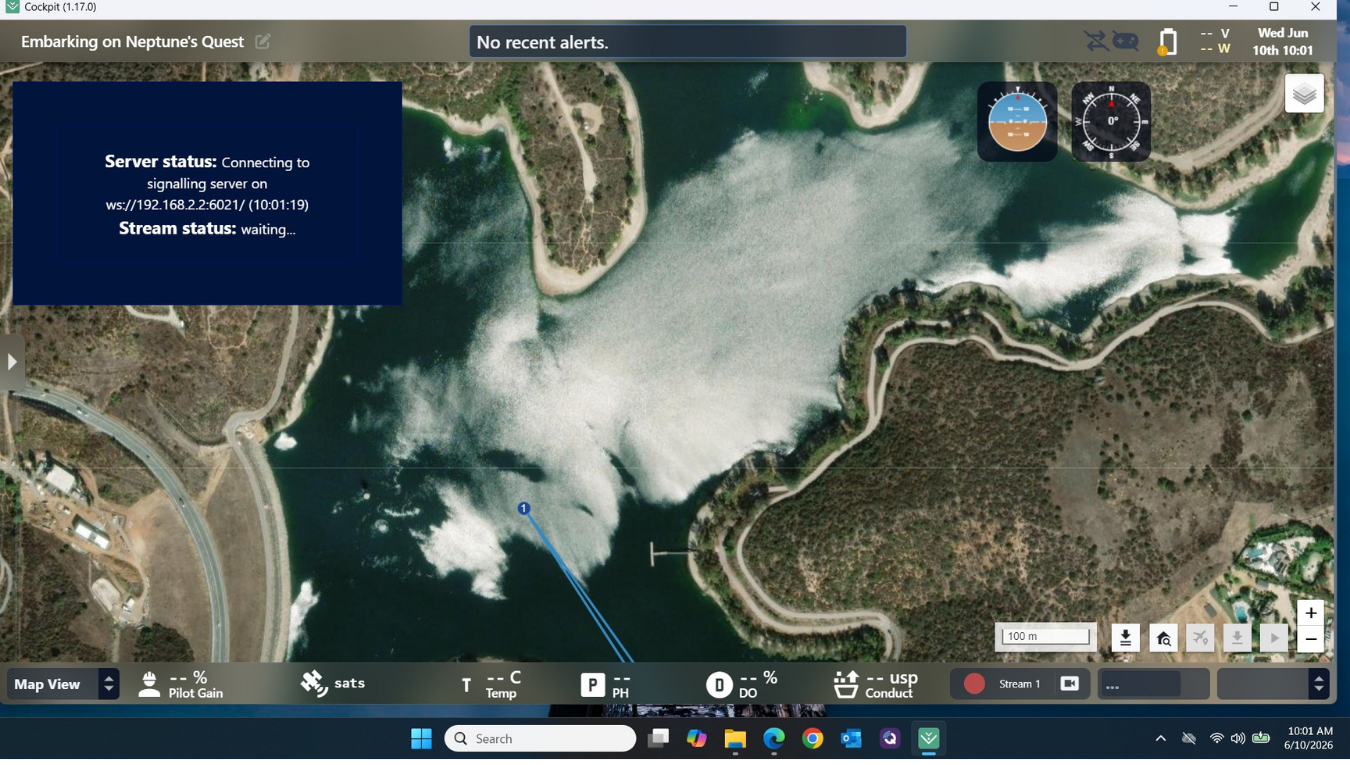
Launching involves inserting the unit into the water and using the remote X-Box video game controller to guide the mission.
Upon launch, the USV will set out on mission according to the location it’s programmed to visit, loiter while collecting water chemistry data, then progress to the next point, and so on.
Data is visualized on the computer in real time in context of mission transect path, shown to the right.
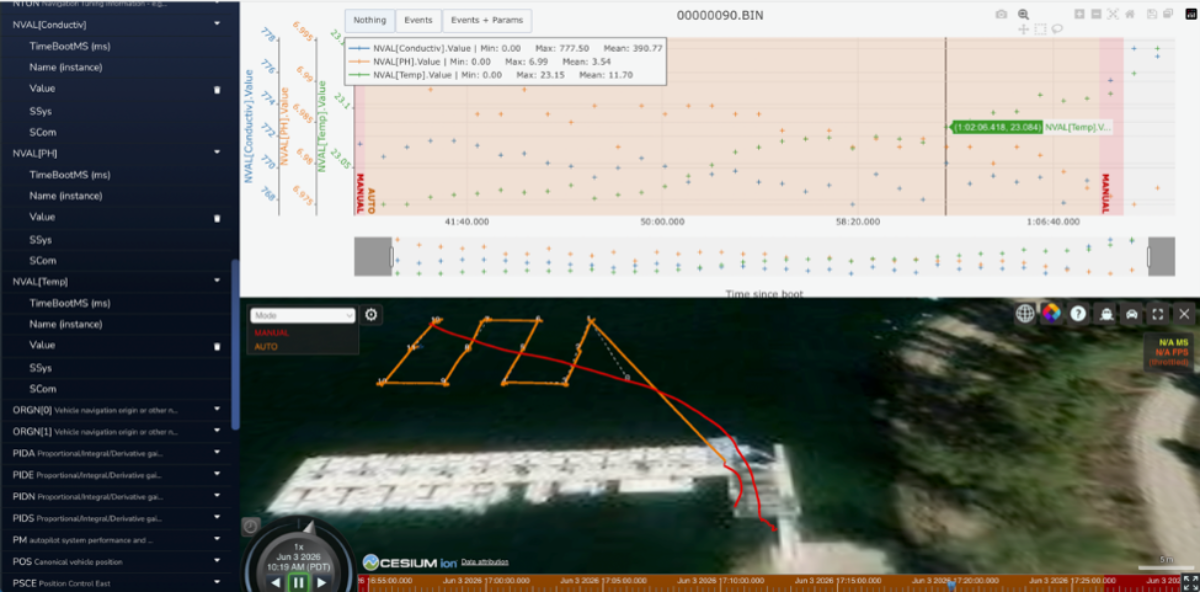
The camera feed is viewed in Cockpit and also recorded with the water sensor values. The video is captured as a video recording, while the data visualization shows the results of correlating GPS position during the survey.
For example, in the test run beneath the dock, you can see the bass and larger fish in the background because of its high resolution.
We run several control tests during case hardening, such as using a Secchi Disk and trigonometry to determine the camera's angle of detection.
Additional tests evaluate visibility in turbid water, the effect of propellers on dissolved oxygen (DO) readings, and the stabilization time for water chemistry data during transects. Furthermore, the system captures and logs this data into accessible files that synchronize water chemistry with GPS coordinates and video feeds.
Next Steps: Foundation Support Allows for Further Refinements
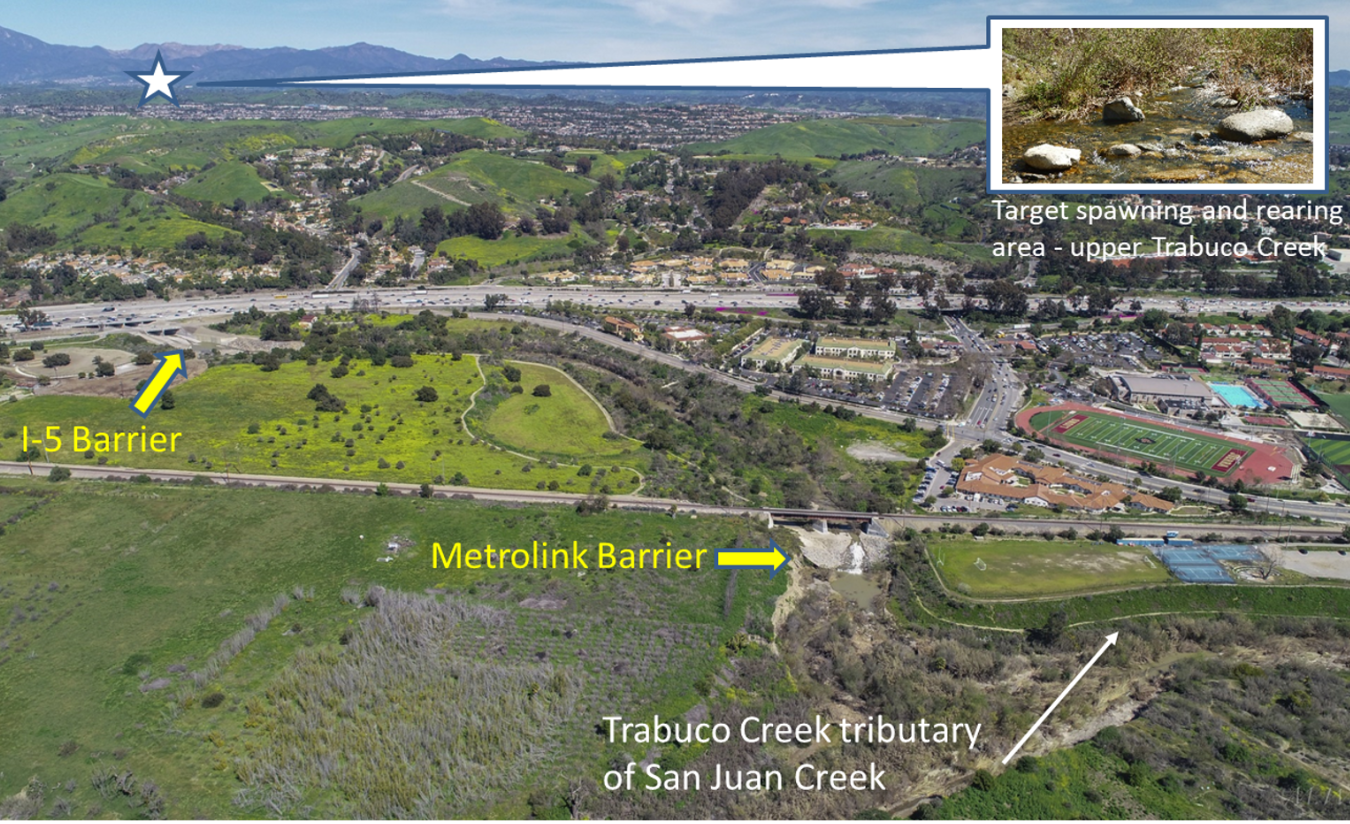
Funding from Whittier Foundation, allows us to further refine and operate the model. Specifically, the custom USV will be case-hardened and moved into V2.0 in San Juan Creek lagoon. This will allow us to work out the kinks, add the eDNA collection module, and run it in several lagoons to understand site-specific challenges. After big rains, we might even be able to monitor incoming steelhead in the San Juan Creek estuary when the sand berm breaks and the creek opens to migratory steelhead traveling to the headwaters of the Santa Ana mountains.


This integrated monitoring system is intended to support ongoing restoration evaluation by providing reliable, real-time insights into lagoon conditions before, during, and after restoration efforts. The long-term goal of this project is to refine the system for use in coastal lagoons across California, enabling more effective restoration evaluations and building a robust dataset to track ecosystem health over time. By turning complex environmental data into actionable insights, the platform helps ensure that every restoration dollar is invested wisely and delivers measurable benefits for fish, water, and people.
Learn more about our work to revitalize Southern California watersheds!